Swerve Drive Simulator
4-wheel swerve holonomic drive framework with integrated kinematics, dynamics, and continuous potential-based obstacle avoidance.
Swerve Drive Simulator
Overview
4-wheel swerve holonomic drive framework with integrated kinematics, dynamics, and continuous potential-based obstacle avoidance.
Project Overview
I designed and simulated a complete 4-wheel swerve holonomic drive framework. The simulator features integrated kinematics, dynamics, and a dedicated simulation environment.
Technical Details
- Control Stack: Utilizes a cascade adaptive+PID controller.
- Pathing & Navigation: Features pure pursuit path tracking and A* based path planning operating over a procedurally generated obstacle maze.
- Obstacle Avoidance: Implements dynamic obstacle avoidance utilizing continuous potential based obstacles.
Path Tracking on Potential map
Dynamic Obstacle Avoidance
Adaptive Torque Control for varying ground friction
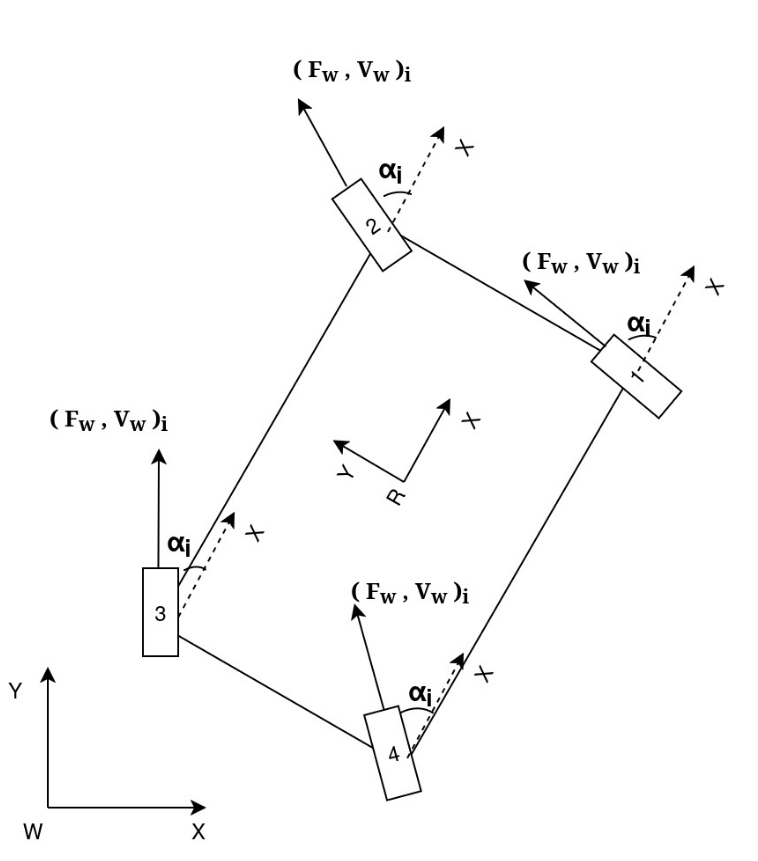
Free Body Diagram for kinematics Design
Holonomic movement visualization