MPC-Based Quadcopter Control using SQP
Designed a Sequential Quadratic Programming (SQP) solver from scratch to drive an MPC framework for advanced aerial maneuvers.
MPC-Based Quadcopter Control using SQP
Overview
Designed a Sequential Quadratic Programming (SQP) solver from scratch to drive an MPC framework for advanced aerial maneuvers.
Project Overview
This project tackled the challenge of advanced aerial maneuvers through optimal control theory. I designed and implemented a Sequential Quadratic Programming (SQP) solver entirely from scratch to drive a Model Predictive Control (MPC) framework for a simulated 2D quadcopter.
Technical Details
Focused on advanced trajectory control, I designed and simulated an MPPI (Model Predictive Path Integral) controller.
The controller was validated on complex quadcopter maneuvers, specifically flips, as well as end-effector control for a 3-DOF robotic arm
The controller successfully executed a stable 360-degree flip followed by an immediate return to a stable hover. This required careful mathematical formulation to balance the optimization cost function against strict, real-time constraints on minimum altitude, thrust forces, and acceleration bounds throughout the maneuver’s execution.
MPC tracking performance
360-degree flip execution
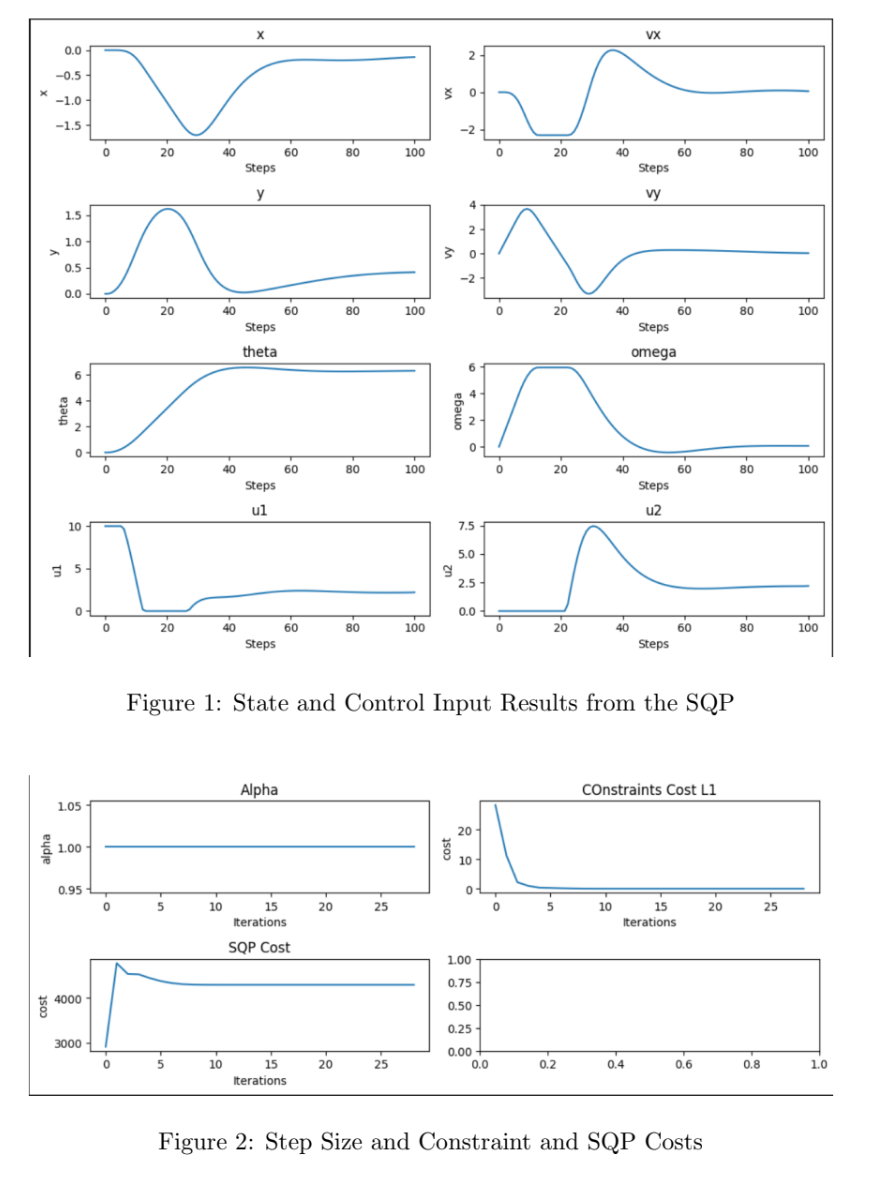
System States and Control Inputs